Lessons:
3. Constructivist epistemology
Home » 5. Radical interactionism » 51. Introduction
On Page 43, we introduced three concepts: 1) the proactive and 2) the reactive parts of the existence, and 3) the cognitive coupling between them. The cognitive coupling works as a succession of decision cycles. At the beginning of each decision cycle, the proactive part decides on an intended sensorimotor interaction to try to enact with reference to the reactive part. At the end of the decision cycle, the reactive part returns the actually enacted sensorimotor interaction to the proactive part (Figure 43).
In lesson 5, we redesign the policy coupling (agent/environment) to be more consistent with the cognitive coupling. We replace the concepts of primitive experiments and results with the concepts of primitive intended interactions and enacted interactions. We call this change the Radical Interactionism (RI) conceptual commitment. Figure 51 compares the RI model with the embodied model introduced on Page 12 that we have been using thus far.
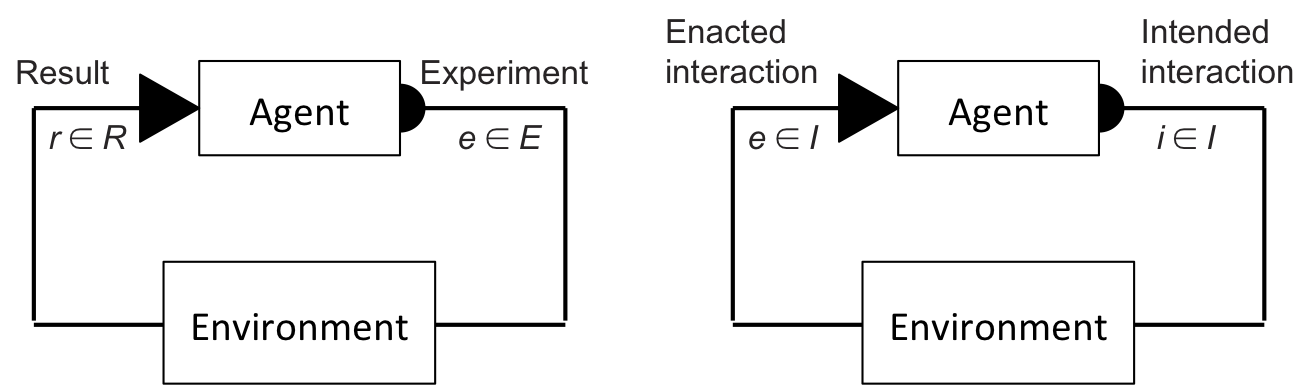
Figure 51: From embodiment (left) to radical interactionism (right).
There are several differences in terminology between the embodied model (Figure 51-left) and the RI model (Figure 51-right). The agent's output data has been renamed i for intended interaction instead of e for experiment. The agent's input data has been renamed e for enacted interaction instead of r for result. Besides the terminology, the only formal difference is that the agent's output data and the agent's input data now belong to the same set I instead of two different sets E and R. This means that the primitive data of the model is only of one kind: sensorimitor interactions. This is the key concept of RI and of Lesson 5:
Use sensorimotor interactions as primitives of the model.
Model primitives are analogous to a mathematical system's primitives, which are used in axioms and theorems to define more complex structures, but which are themselves undefined within the system. Traditional cognitive models take percepts and actions as primitive notions. We, in the previous lessons, took experiments and results as primitive notions, and derived the notion of sensorimotor interaction from them. The RI conceptual commitment implies an inversion of this reasoning, taking instead interactions as the primitive notions and deriving experiments and results from interactions.
On Page 44, we already introduced the problem of constructing experiments and results from interactions. RI generalizes this idea by removing primitive experiments and results from the model, and considering all experiments and results as abstract. This generalization will simplify our algorithms and help us address the programming problems pending on Page 45. RI will also impact the way we design developmental robots as we are going to see on Page 53.
Figure 51-right presents the RI process in a similar way as the sensorimotor process on Page 21 and the cognitive coupling process on Page 43. At the beginning of cycle t, the agent chooses an intended primitive interaction it to enact on the environment. The attempt to enact it may change the environment or not. At the end of cycle t, the agent receives the enacted primitive interaction et. If et = it, then we consider the agent's enaction as a success. If et ≠ it, then we consider the agent's attempt to enact it as a failure.
As an example, the primitive interaction it may correspond to actively feeling (through touching) an object in front of the agent, involving both a movement and a sensory feedback. The tentative enaction of it may indeed result in feeling an object, in which case et = it. It may, however, result in feeling nothing if there is no object in front of the agent. In this case the enacted interaction et corresponds to a different interaction: moving while feeling nothing. The agent constructs knowledge about its environment and organizes its behavior through regularities observed in the sequences of enacted interactions.
In Lesson 6, we will rely on RI to move us toward designing agents that can learn spatio-sequential regularities of interaction instead of only-sequential regularities as we have been doing thus far. We will achieve this by designing a cognitive architecture that can localize enacted interactions in space.
Overall, RI helps better understand embodiment and sensorimotor learning by placing interactions at the core of the model, as these theories recommend. This helps us address the constuctivist learning problem of constructing knowledge of reality from regularities of sensorimotor interactions.
See public discussions about this page or start a new discussion by clicking on the Google+ Share button. Please type the #IDEALMOOC051 hashtag in your post: