Lessons:
3. Constructivist epistemology
Home » 1. Embodied paradigm » 12. Design
The embodied paradigm suggests shifting perspective from:
- the traditional view in which the agent interprets input data as if it represented the environment (Figure 12/left),
to:
- the embodied view in which the agent constructs a perception of the environment through the active experience of interaction (Figure 12/right).
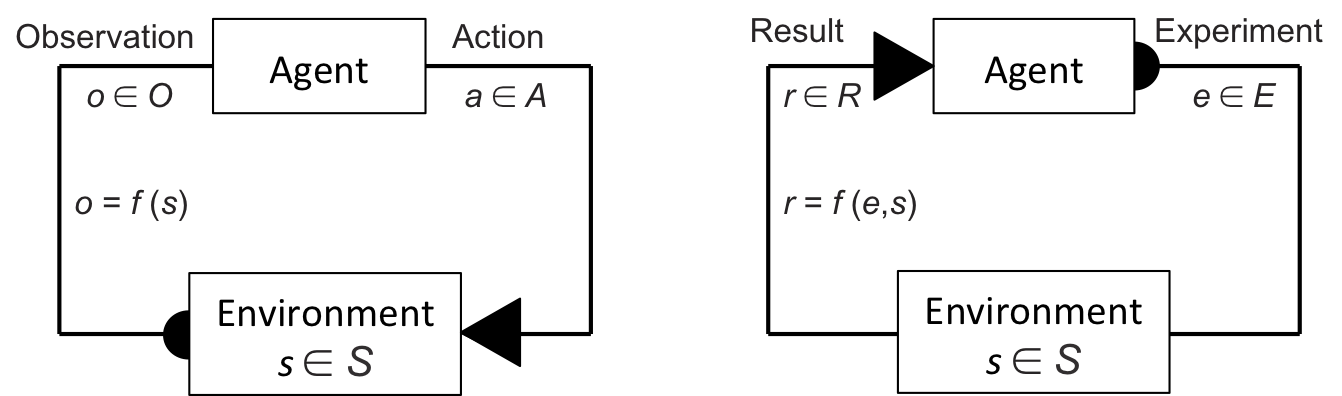
Figure 12: Embodied model (right) compared to the traditional model (left). In the traditional model, the cycle conceptually starts with observing the environment (black circle on the environment) and ends by acting on the environment (black arrow on the environment). In the embodied model, the cycle conceptually starts with the agent performing an experiment (black circle on the agent), and ends by the agent receiving the result of the experiment (black arrow on the agent).
Most representations of the cycle agent/environment do not make explicit the conceptual starting point and end point of the cycle. Since the cycle revolves indefinitely, why should we care anyway?
We should care because, depending on the conceptual starting and end points, we design the agent's algorithm, the robot's sensors, or the simulated environment differently.
In the traditional view, we design the agent's input (called observation o in Figure 12/left) as if it represented the environment's state. In the case of simulated environments, we implement o as a function of s, where s is the state of the environment (o = f (s) in Figure 12/left). In the case of robots, we process the sensor data as if it represented the state of the real world, even though this state is not accessible. This is precisely what the embodied paradigm suggests to avoid because it amounts to considering the agent's input as a representation of the world.
In the embodied view, we design the agent's input (called result r in Figure 12/right) as a result of an experiment initiated by the agent. In simulated environments, we implement r as a function of the experiment and of the state (r = f (e,s) in Figure 12/right). In a given state of the environment, the result may vary according to the experiment. We may even implement environments that have no state, as we do in the next page. When designing robots, we process the sensor data as representing the result of an experiment initiated by the robot.
See public discussions about this page or start a new discussion by clicking on the Google+ Share button. Please type the #IDEALMOOC012 hashtag in your post: