Interactive simulation
Our aim is to simulate the movement of soft bodies in interaction. The simulations are coupled to physical device to enable interaction between users and the 3D simulations. The difficulty is to propose efficient models and parallel algorithms on the GPU of simulation to achieve interactive execution time. One direct application is to develop a new kind of training simulators for medical gestures.
Members involved : Fabrice Jaillet, Florence Zara
New biomechanical models
We proposed new modeling approaches to simulate in real-time soft bodies with:
-
the extension of the mass-springs model to improve its accuracy;
- the extension of the mass-tensor model to automatically generate the formulation of interaction forces;
-
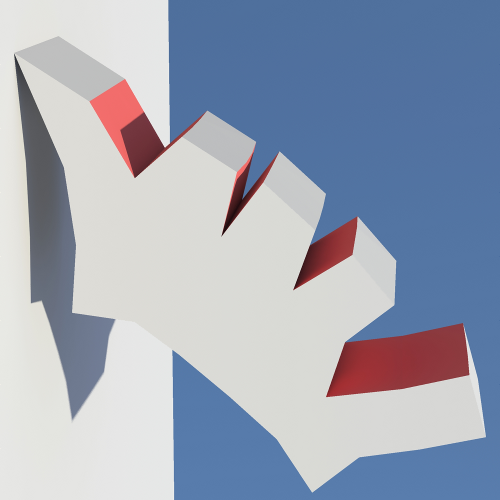
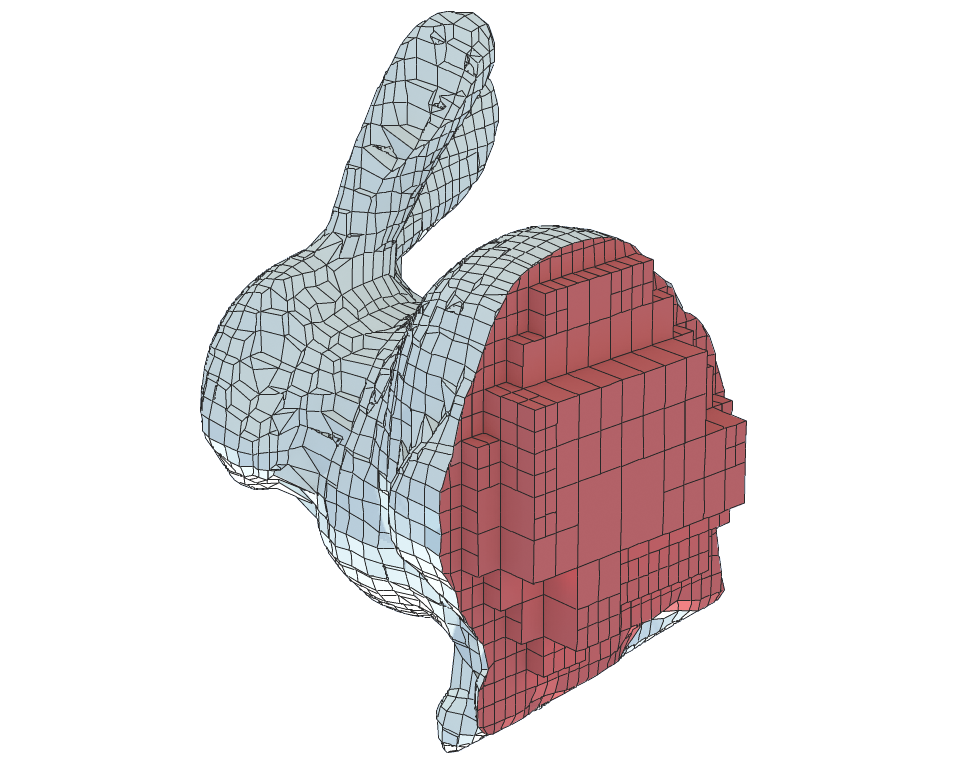
a unified topological and physical model enabling modifications (like refinement, cutting, piercing) of the object during the physical simulation;
-
a surface model to decrease the computational cost of the simulation.
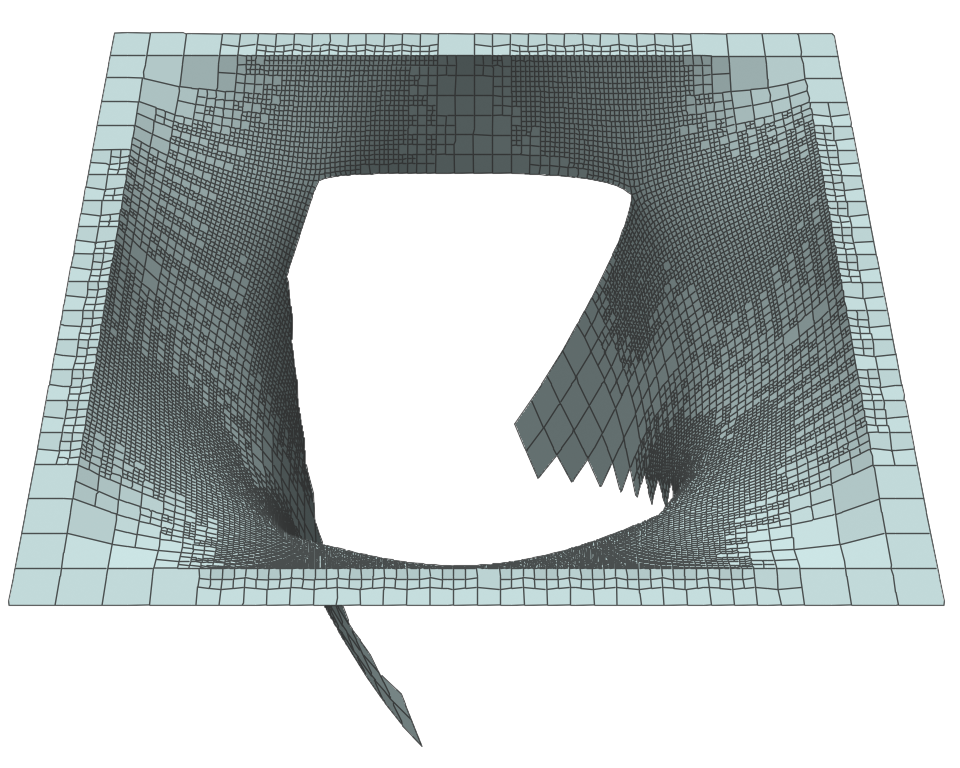
Adaptive simulation
A bottleneck for achieving real-time is the adaptation of the object representation during the simulation. In this sense, we are working on:
-
mesh adaptation according to both geometrical and physical criteria;
-
adaptation of the computation methods involving adaptive time steps, inline switch between implicit/explicit integration methods, behavior’s law, etc.
-
use of a posteriori or dynamic error criterium.


One application of our research concerns the development of complete simulators based on Virtual Reality.
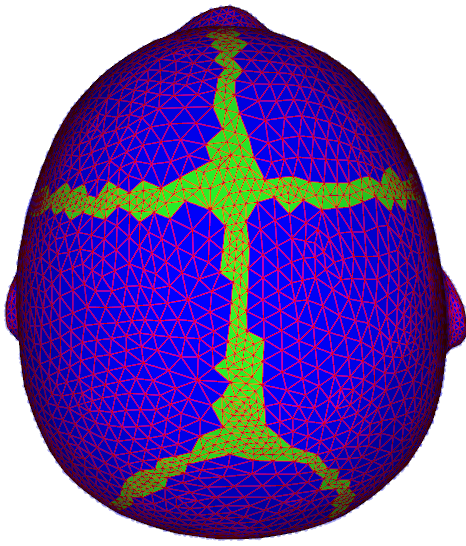
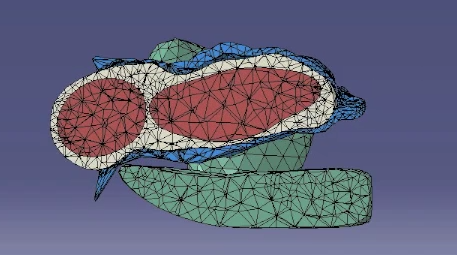
The SAGA project (ANR MN 2012) propose a complete simulator for learning obstetric gestures for childbirth, restoring a level of similarity with reality determined based on training objectives. This simulator couple:
-
A numerical simulation enabling the determination of the trajectory of the fetus during the childbirth taking into account the morphology of the woman, the position of the fetus and various disorders related to childbirth, and gestures of the user; the computation of efforts due to the interaction between the fetus and the pelvic muscles; the visualization of the organs deformation induced by the descent of the fetus.
-
A physical system on which we can make the forces exerted during delivery by ensuring the sense of touch (fetal head, muscles) and retrieve the user’s movements.
-
A software educational component that relies on the identification of parameters relevant to real situations, their incorporation into the system, the definition of criteria for monitoring and evaluation of user actions, and developing ways of generating customized training courses to each user.

Interactive animation
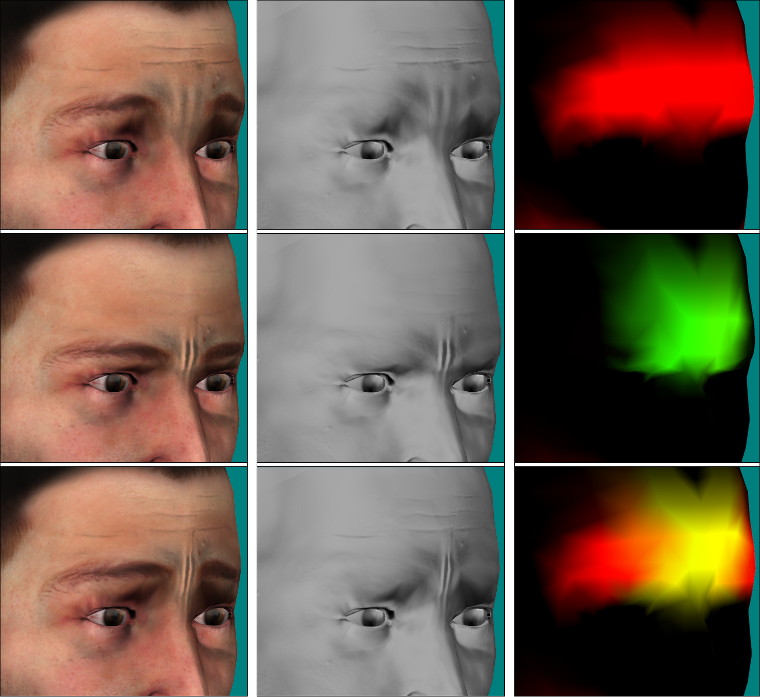
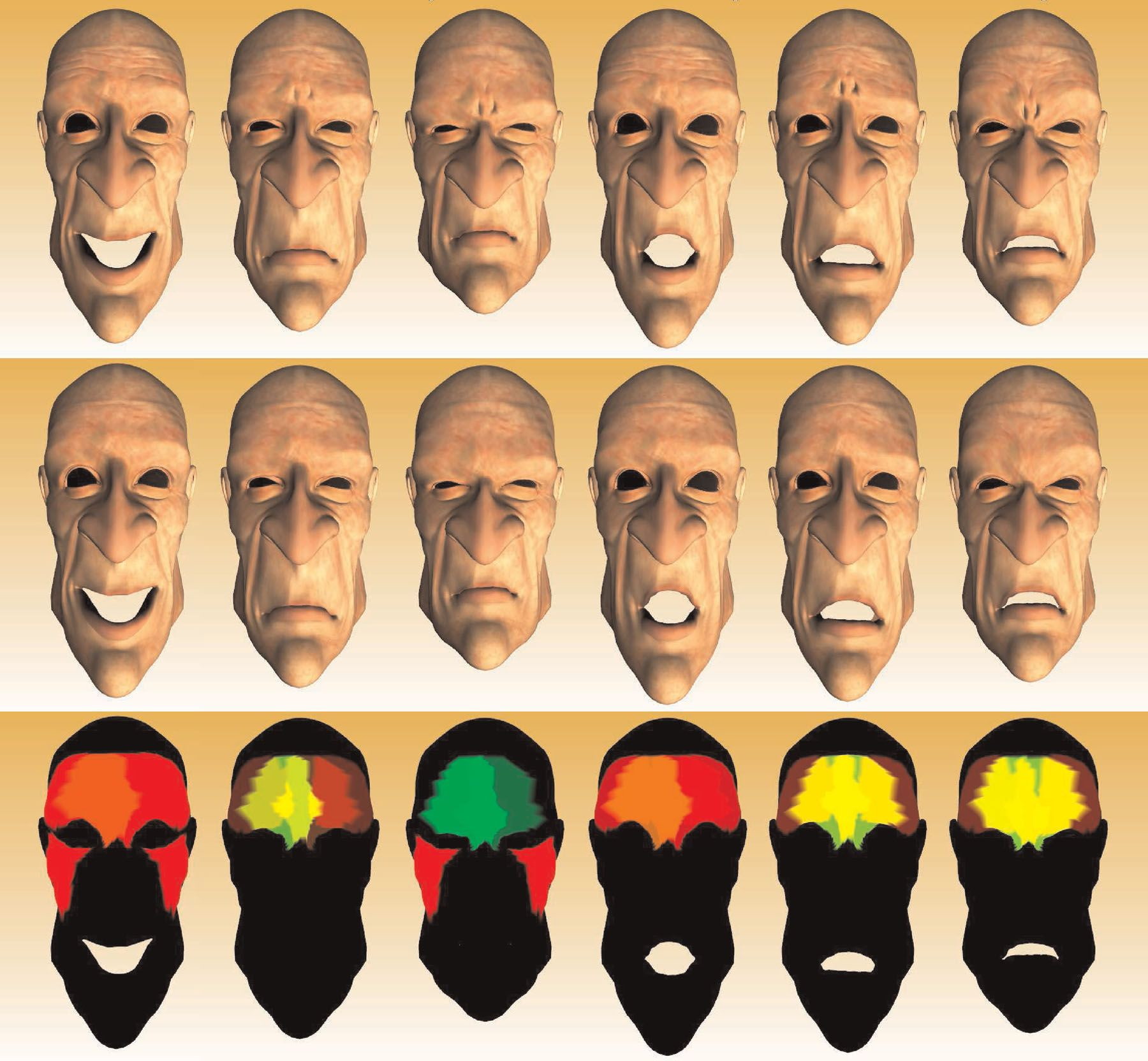
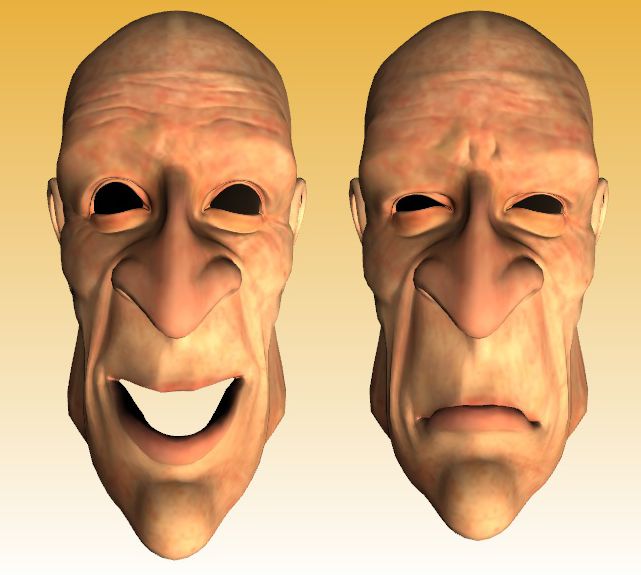
Face: from capture to animation
This research aimed at producing realistic facial animation. This original approach by its transversal will sweep many techniques from the production of motion pictures starting with the capture. The techniques explored then share the topic of study ‘face’ and not methods of problem-solving.
Members involved: Alexandre Meyer, Saïda Bouakaz

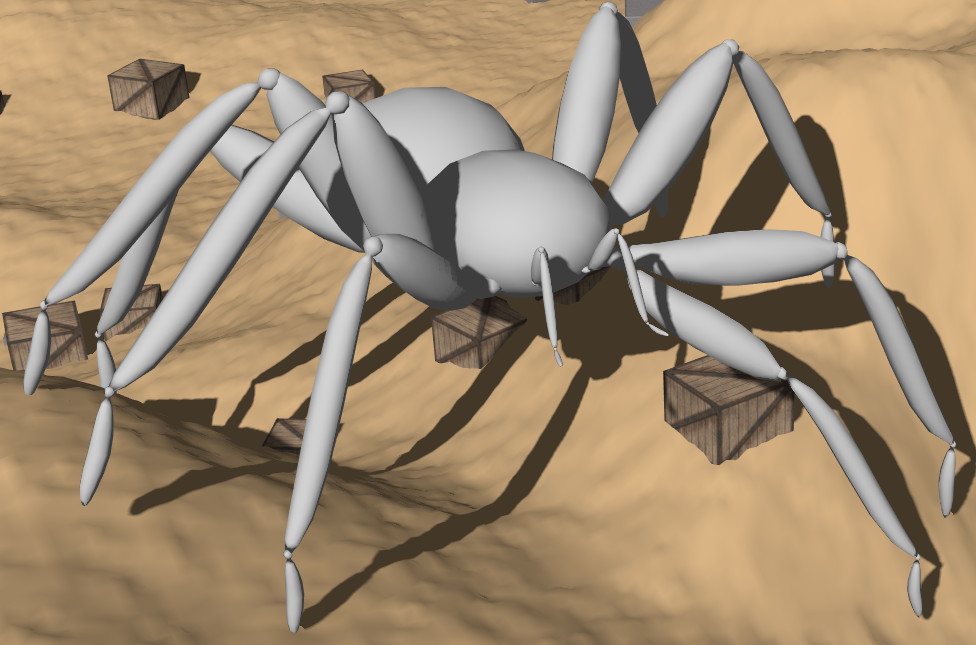
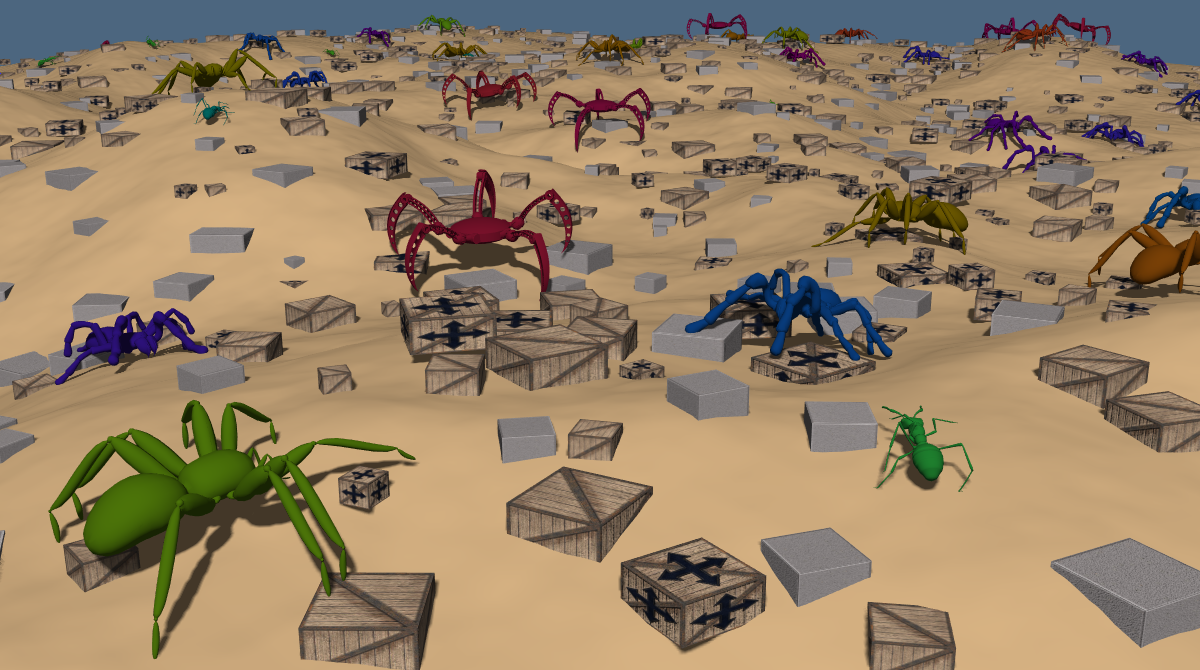
Articulated body motion generation
Multi-legged characters like quadrupeds, arachnids, reptiles, etc. are an essential part of any simulation and they greatly participate in making virtual worlds more life-like. These multi-legged characters should be capable of moving freely and in a believable way in order to convey a better immersive experience for the users. But these locomotion animations are quite rich due to the complexity of the navigated environments and the variety of the animated morphologies, gaits, body sizes and proportions, etc. Another challenge when modeling such animations arises from the lack of motion data inherent to either the difficulty to obtain them or the impossibility to capture them.
Members involved: Alexandre Meyer, Saida Bouakaz

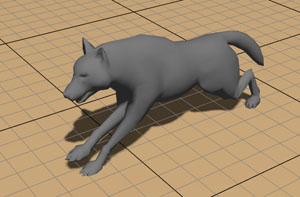
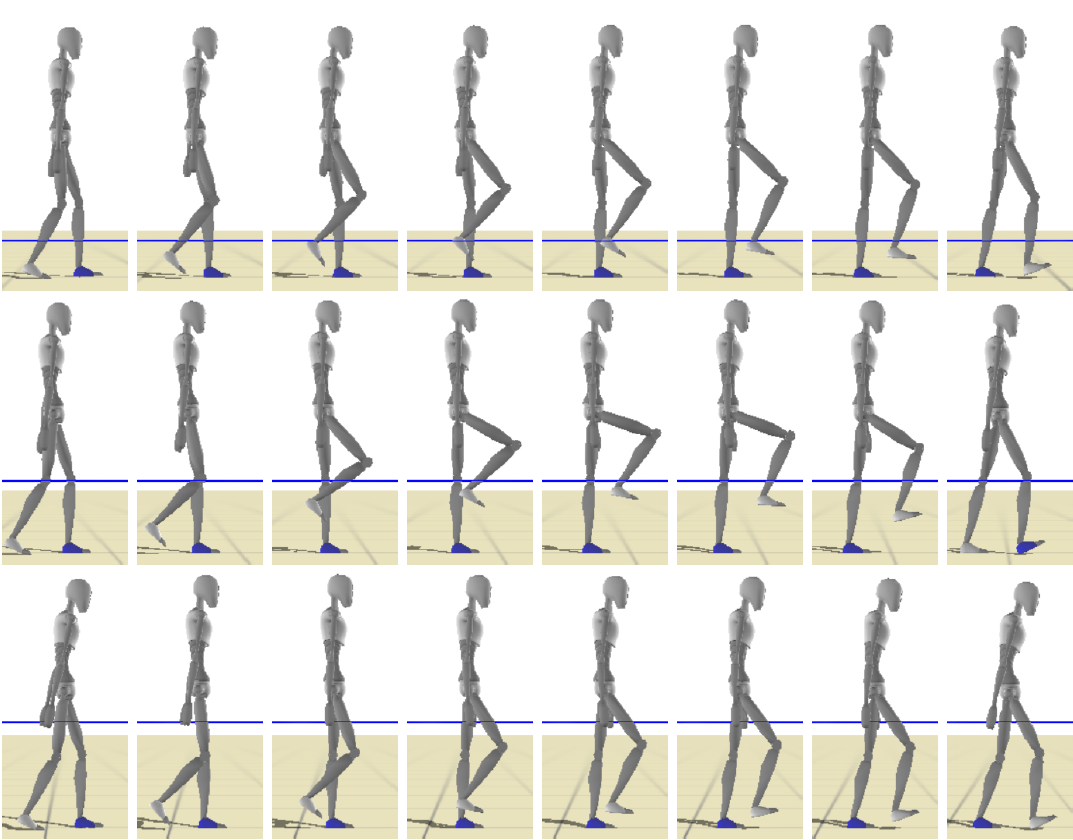
Physics-based animation
One way to animate virtual humans consists in simulating its movement in a physics environment. Controlling the entire body in such an environment (i.e. by applying forces and torques) is a very challenging task but the main reward lies in the flexibility and automation of producing motion (e.g. responses to external perturbations or inner modifications are calculated by the physics engine, nothing has to be done to describe the resulting kinematic). In the case the physics simulation must track an existing motion, the main difficulty is to assure a reasonable tracking while preserving naturalism (e.g. respect of balance). The controller is responsible for this task.
Members involved: Nicolas Pronost, Saida Bouakaz