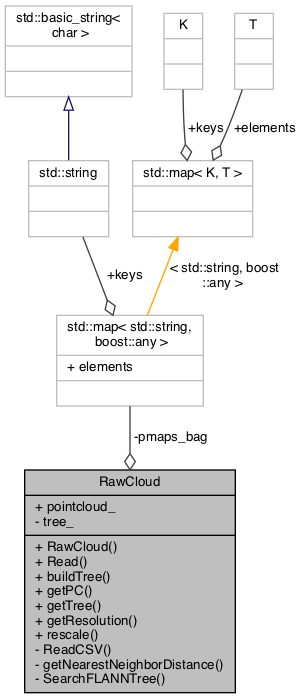
#include <cloud.h>
|
| Eigen::Matrix< float, Eigen::Dynamic, 3 > * | pointcloud_ |
| |
|
| int | ReadCSV (std::string filepath) |
| |
| float | getNearestNeighborDistance (Eigen::Vector3f pt) |
| |
| void | SearchFLANNTree (flann::Index< flann::L2< float >> *index, Eigen::Vector3f &input, std::vector< int > &indices, std::vector< float > &dists, int nn) |
| |
Definition at line 45 of file cloud.h.
◆ RawCloud()
◆ buildTree()
| void RawCloud::buildTree |
( |
| ) |
|
|
inline |
◆ getNearestNeighborDistance()
| float RawCloud::getNearestNeighborDistance |
( |
Eigen::Vector3f |
pt | ) |
|
|
inlineprivate |
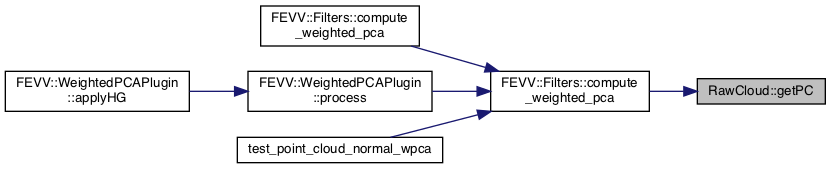
◆ getPC()
| Eigen::Matrix<float, Eigen::Dynamic, 3>* RawCloud::getPC |
( |
| ) |
|
|
inline |
◆ getResolution()
| float RawCloud::getResolution |
( |
| ) |
|
|
inline |
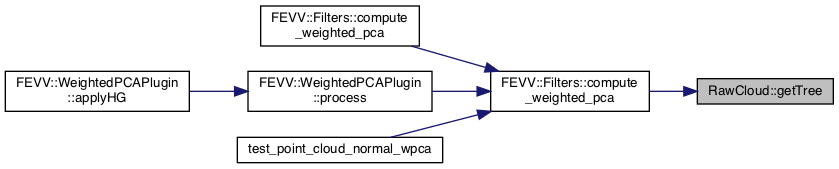
◆ getTree()
| flann::Index<flann::L2<float> >* RawCloud::getTree |
( |
| ) |
|
|
inline |
◆ Read()
| int RawCloud::Read |
( |
std::string |
filepath | ) |
|
◆ ReadCSV()
| int RawCloud::ReadCSV |
( |
std::string |
filepath | ) |
|
|
inlineprivate |
◆ rescale()
| void RawCloud::rescale |
( |
| ) |
|
|
inline |
◆ SearchFLANNTree()
| void RawCloud::SearchFLANNTree |
( |
flann::Index< flann::L2< float >> * |
index, |
|
|
Eigen::Vector3f & |
input, |
|
|
std::vector< int > & |
indices, |
|
|
std::vector< float > & |
dists, |
|
|
int |
nn |
|
) |
| |
|
inlineprivate |
◆ pmaps_bag
◆ pointcloud_
| Eigen::Matrix<float, Eigen::Dynamic, 3>* RawCloud::pointcloud_ |
◆ tree_
| flann::Index<flann::L2<float> >* RawCloud::tree_ |
|
private |
The documentation for this class was generated from the following files:
- /Users/mac/builds/efd823a3/0/MEPP-team/MEPP2/FEVV/Filters/Generic/PointCloud/WeightedPCANormals/cloud.h
- /Users/mac/builds/efd823a3/0/MEPP-team/MEPP2/FEVV/Filters/Generic/PointCloud/WeightedPCANormals/cloud.inl