#include <core.h>
|
| | CApp () |
| |
| | CApp (Eigen::Matrix< float, Eigen::Dynamic, 3 > *pc, flann::Index< flann::L2< float >> *tree, float noise) |
| |
| | CApp (Eigen::Matrix< float, Eigen::Dynamic, 3 > *pc, flann::Index< flann::L2< float >> *tree, int ref, float noise) |
| |
| | CApp (float divFact, float limMu, float limMuPos, Eigen::Matrix< float, Eigen::Dynamic, 3 > *pc, flann::Index< flann::L2< float >> *tree, int ref, float noise) |
| |
| | ~CApp () |
| |
| void | setTree (flann::Index< flann::L2< float >> *t) |
| |
| void | setPc (Eigen::Matrix< float, Eigen::Dynamic, 3 > *pc) |
| |
| void | setRef (int ref) |
| |
| void | setNormal (Eigen::Vector3f norm) |
| |
| void | setPoint (Eigen::Vector3f point) |
| |
| void | setLimMu (float limMu) |
| |
| void | setNbrNeighbors (int N) |
| |
| void | setLimMuPos (float limMuPos) |
| |
| void | setDivFact (float divFact) |
| |
| void | setNoise (float noise) |
| |
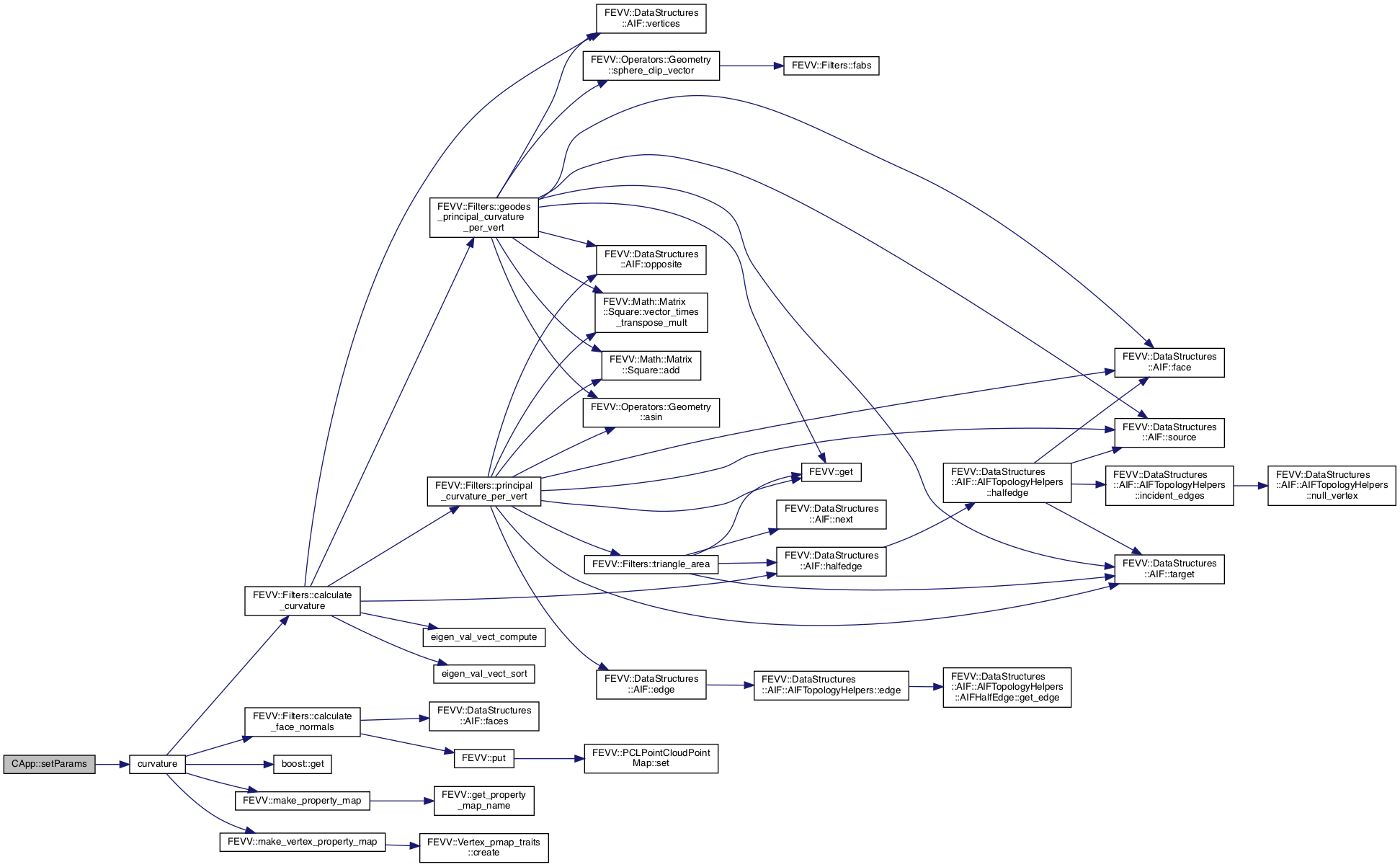
| void | setParams (float divFact, float curvature) |
| |
| Eigen::Vector3f | getNormal () |
| |
| Eigen::Vector3f | getPoint () |
| |
| Eigen::Matrix< float, Eigen::Dynamic, 3 > | getNeighborhood () |
| |
| int | get_N_neigh () |
| |
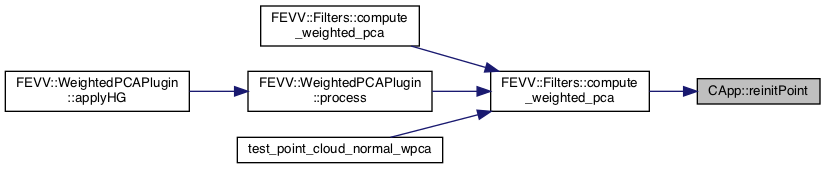
| void | reinitPoint () |
| |
| void | ComputeDist () |
| |
| void | SearchFLANNTreeKnn (flann::Index< flann::L2< float >> *index, Eigen::Vector3f &input, std::vector< int > &indices, std::vector< float > &dists, int nn) |
| |
| void | selectNeighborsKnn (int N) |
| |
| void | selectNeighborsRadius (float r) |
| |
| void | init1 () |
| |
| void | reinitFirst0 () |
| |
| void | init2 () |
| |
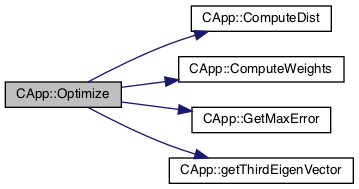
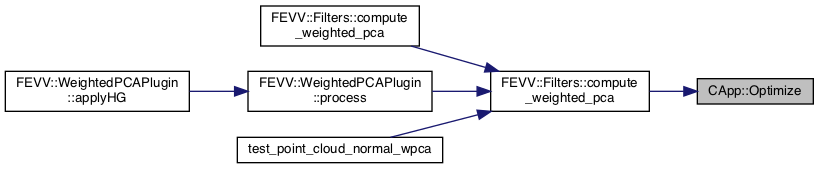
| void | Optimize (bool first) |
| |
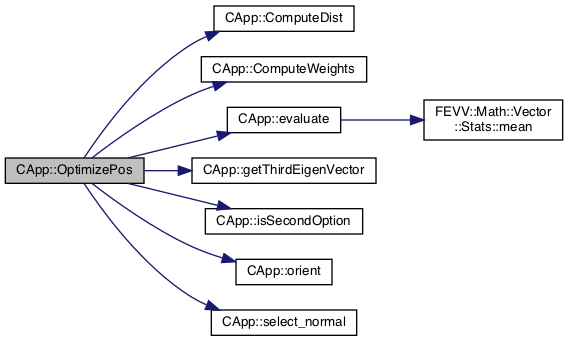
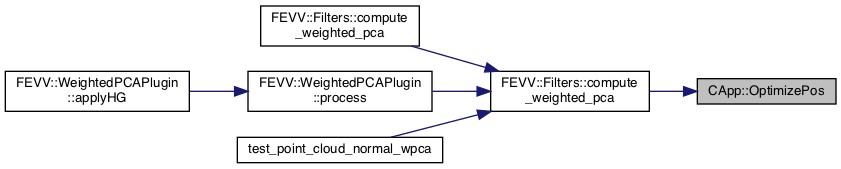
| void | OptimizePos (bool first, float thresh_weigh) |
| |
| Eigen::Vector3f | getEdgeDirection (int it) |
| |
| void | evaluate (int *impact, float *moyError, float impacter_weigh) |
| |
| void | select_normal () |
| |
| void | addSymmetricDist () |
| |
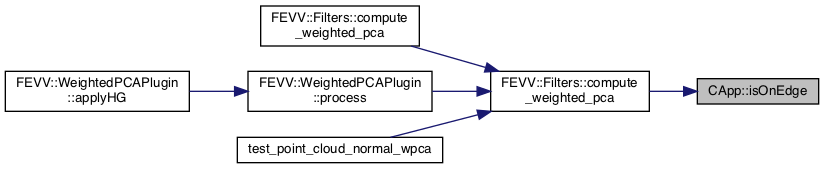
| bool | isOnEdge () |
| |
| bool | isSecondOption () |
| |
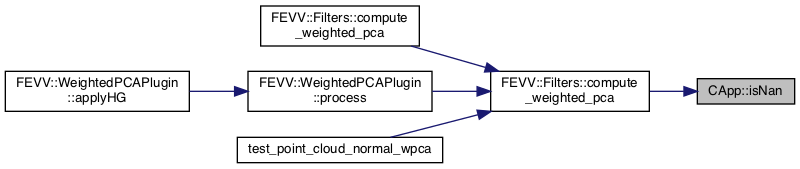
| bool | isNan () |
| |
Definition at line 65 of file core.h.
◆ CApp() [1/4]
◆ CApp() [2/4]
| CApp::CApp |
( |
Eigen::Matrix< float, Eigen::Dynamic, 3 > * |
pc, |
|
|
flann::Index< flann::L2< float >> * |
tree, |
|
|
float |
noise |
|
) |
| |
|
inline |
◆ CApp() [3/4]
| CApp::CApp |
( |
Eigen::Matrix< float, Eigen::Dynamic, 3 > * |
pc, |
|
|
flann::Index< flann::L2< float >> * |
tree, |
|
|
int |
ref, |
|
|
float |
noise |
|
) |
| |
|
inline |
◆ CApp() [4/4]
| CApp::CApp |
( |
float |
divFact, |
|
|
float |
limMu, |
|
|
float |
limMuPos, |
|
|
Eigen::Matrix< float, Eigen::Dynamic, 3 > * |
pc, |
|
|
flann::Index< flann::L2< float >> * |
tree, |
|
|
int |
ref, |
|
|
float |
noise |
|
) |
| |
|
inline |
◆ ~CApp()
◆ actualizeMu()
| void CApp::actualizeMu |
( |
| ) |
|
|
private |
◆ addSymmetricDist()
| void CApp::addSymmetricDist |
( |
| ) |
|
◆ ComputeDist()
| void CApp::ComputeDist |
( |
| ) |
|
|
inline |
◆ ComputeNormProjError()
| void CApp::ComputeNormProjError |
( |
std::vector< float > & |
er_proj | ) |
|
|
private |
◆ ComputeWeights()
| void CApp::ComputeWeights |
( |
| ) |
|
|
inlineprivate |
◆ evaluate()
| void CApp::evaluate |
( |
int * |
impact, |
|
|
float * |
moyError, |
|
|
float |
impacter_weigh |
|
) |
| |
|
inline |
◆ get_N_neigh()
| int CApp::get_N_neigh |
( |
| ) |
|
|
inline |
◆ getEdgeDirection()
| Eigen::Vector3f CApp::getEdgeDirection |
( |
int |
it | ) |
|
◆ GetMaxError()
| float CApp::GetMaxError |
( |
| ) |
|
|
inlineprivate |
◆ getNeighborhood()
| Eigen::Matrix<float, Eigen::Dynamic, 3> CApp::getNeighborhood |
( |
| ) |
|
|
inline |
◆ getNormal()
| Eigen::Vector3f CApp::getNormal |
( |
| ) |
|
|
inline |
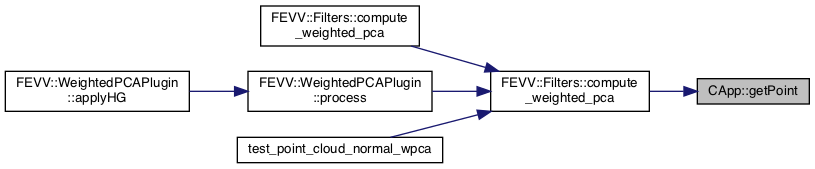
◆ getPoint()
| Eigen::Vector3f CApp::getPoint |
( |
| ) |
|
|
inline |
◆ getThirdEigenVector()
| Eigen::Vector3f CApp::getThirdEigenVector |
( |
Eigen::Matrix3f & |
C | ) |
|
|
inlineprivate |
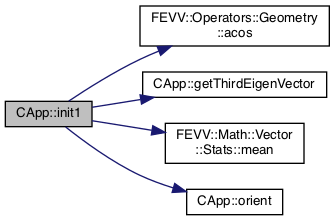
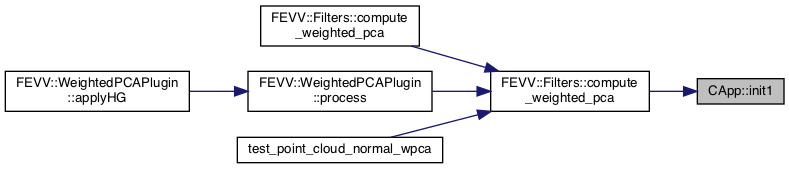
◆ init1()
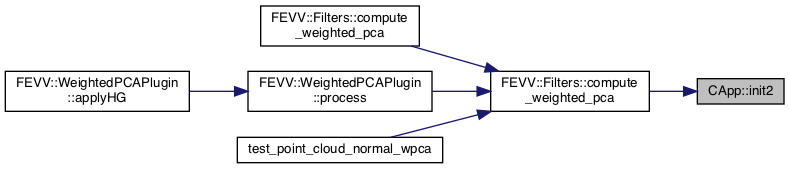
◆ init2()
◆ init_weight()
| void CApp::init_weight |
( |
| ) |
|
|
inlineprivate |
◆ isNan()
◆ isOnEdge()
◆ isSecondOption()
| bool CApp::isSecondOption |
( |
| ) |
|
|
inline |
◆ Optimize()
| void CApp::Optimize |
( |
bool |
first | ) |
|
|
inline |
◆ OptimizePos()
| void CApp::OptimizePos |
( |
bool |
first, |
|
|
float |
thresh_weigh |
|
) |
| |
|
inline |
◆ orient()
◆ reinitFirst0()
| void CApp::reinitFirst0 |
( |
| ) |
|
|
inline |
◆ reinitPoint()
| void CApp::reinitPoint |
( |
| ) |
|
|
inline |
◆ save_itr()
| void CApp::save_itr |
( |
int |
itr | ) |
|
|
private |
◆ SearchFLANNTreeKnn()
| void CApp::SearchFLANNTreeKnn |
( |
flann::Index< flann::L2< float >> * |
index, |
|
|
Eigen::Vector3f & |
input, |
|
|
std::vector< int > & |
indices, |
|
|
std::vector< float > & |
dists, |
|
|
int |
nn |
|
) |
| |
|
inline |
Find the "num_closest" nearest neighbors to the query_point[0:dim-1]. Their indices are stored inside the result object.
- See also
- radiusSearch, findNeighbors
- Note
- nChecks_IGNORED is ignored but kept for compatibility with the original FLANN interface.
- Returns
- Number
N of valid points in the result set. Only the first N entries in out_indices and out_distances_sq will be valid. Return may be less than num_closest only if the number of elements in the tree is less than num_closest.
Definition at line 63 of file core.inl.
◆ select_normal()
| void CApp::select_normal |
( |
| ) |
|
|
inline |
◆ selectNeighborsKnn()
| void CApp::selectNeighborsKnn |
( |
int |
N | ) |
|
|
inline |
◆ selectNeighborsRadius()
| void CApp::selectNeighborsRadius |
( |
float |
r | ) |
|
◆ setDivFact()
| void CApp::setDivFact |
( |
float |
divFact | ) |
|
|
inline |
◆ setLimMu()
| void CApp::setLimMu |
( |
float |
limMu | ) |
|
|
inline |
◆ setLimMuPos()
| void CApp::setLimMuPos |
( |
float |
limMuPos | ) |
|
|
inline |
◆ setNbrNeighbors()
| void CApp::setNbrNeighbors |
( |
int |
N | ) |
|
|
inline |
◆ setNoise()
| void CApp::setNoise |
( |
float |
noise | ) |
|
|
inline |
◆ setNormal()
| void CApp::setNormal |
( |
Eigen::Vector3f |
norm | ) |
|
|
inline |
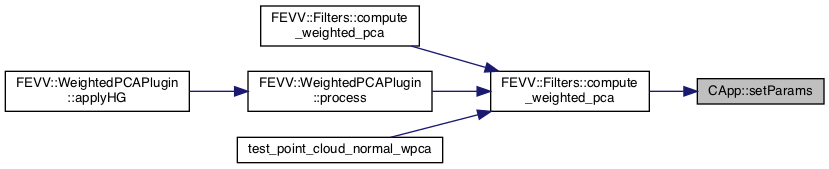
◆ setParams()
| void CApp::setParams |
( |
float |
divFact, |
|
|
float |
curvature |
|
) |
| |
|
inline |
◆ setPc()
| void CApp::setPc |
( |
Eigen::Matrix< float, Eigen::Dynamic, 3 > * |
pc | ) |
|
|
inline |
◆ setPoint()
| void CApp::setPoint |
( |
Eigen::Vector3f |
point | ) |
|
|
inline |
◆ setRef()
| void CApp::setRef |
( |
int |
ref | ) |
|
|
inline |
◆ setTree()
| void CApp::setTree |
( |
flann::Index< flann::L2< float >> * |
t | ) |
|
|
inline |
◆ centroid_
| Eigen::Vector3f CApp::centroid_ |
|
private |
◆ curvature_
◆ diff_error_
| std::vector<float> CApp::diff_error_ |
|
private |
◆ dist_
| Eigen::Matrix<float, Eigen::Dynamic, 3> CApp::dist_ |
|
private |
◆ divFact_
◆ er_max
◆ error_
| std::vector<float> CApp::error_ |
|
private |
◆ finalNormal_
| Eigen::Vector3f CApp::finalNormal_ |
◆ finalPos_
| Eigen::Vector3f CApp::finalPos_ |
◆ impactFirst_
◆ impactSecond_
◆ jamais_fait
◆ limMu_
◆ limMuPos_
◆ moyErrorFirst_
| float CApp::moyErrorFirst_ |
|
private |
◆ moyErrorSecond_
| float CApp::moyErrorSecond_ |
|
private |
◆ mu_
◆ mu_init2_
◆ n_neigh_
◆ neighborhood_
| Eigen::Matrix<float, Eigen::Dynamic, 3> CApp::neighborhood_ |
|
private |
◆ noise_
◆ normal
| Eigen::Vector3f CApp::normal |
◆ normalFirst0_
| Eigen::Vector3f* CApp::normalFirst0_ |
|
private |
◆ normalFirst1_
| Eigen::Vector3f* CApp::normalFirst1_ |
|
private |
◆ normalFirst2_
| Eigen::Vector3f* CApp::normalFirst2_ |
|
private |
◆ normalSecond0_
| Eigen::Vector3f* CApp::normalSecond0_ |
|
private |
◆ normalSecond1_
| Eigen::Vector3f* CApp::normalSecond1_ |
|
private |
◆ normalSecond2_
| Eigen::Vector3f* CApp::normalSecond2_ |
|
private |
◆ phi
◆ pointcloud_
| Eigen::Matrix<float, Eigen::Dynamic, 3>* CApp::pointcloud_ |
|
private |
◆ pointFirst_
| Eigen::Vector3f* CApp::pointFirst_ |
|
private |
◆ pointSecond_
| Eigen::Vector3f* CApp::pointSecond_ |
|
private |
◆ pt
◆ ptRef_
| Eigen::Vector3f CApp::ptRef_ |
|
private |
◆ ref_
◆ SuspectedOnEdge_
| bool CApp::SuspectedOnEdge_ |
◆ theta
◆ thresh_proj_
◆ tree_
| flann::Index<flann::L2<float> >* CApp::tree_ |
|
private |
◆ weights_
| Eigen::VectorXf CApp::weights_ |
|
private |
The documentation for this class was generated from the following files:
- /Users/mac/builds/efd823a3/0/MEPP-team/MEPP2/FEVV/Filters/Generic/PointCloud/WeightedPCANormals/core.h
- /Users/mac/builds/efd823a3/0/MEPP-team/MEPP2/FEVV/Filters/Generic/PointCloud/WeightedPCANormals/core.inl