|
|
3d indoor reconstruction from point clouds LiDAR acquisitions datasets and normal vectors estimation code |
|
|
3d indoor reconstruction from point clouds LiDAR acquisitions datasets and normal vectors estimation code |
This page stores data sets of structured environments acquired in the University of Clermont-Ferrand. They can be used to test registration algorithms and compare them to Structured Scene Features based Registration (SSFR).
Some code is also provided to estimate normals in such point clouds handling the classic issues relative to sharp features, sampling anisotropy and measurement noise.
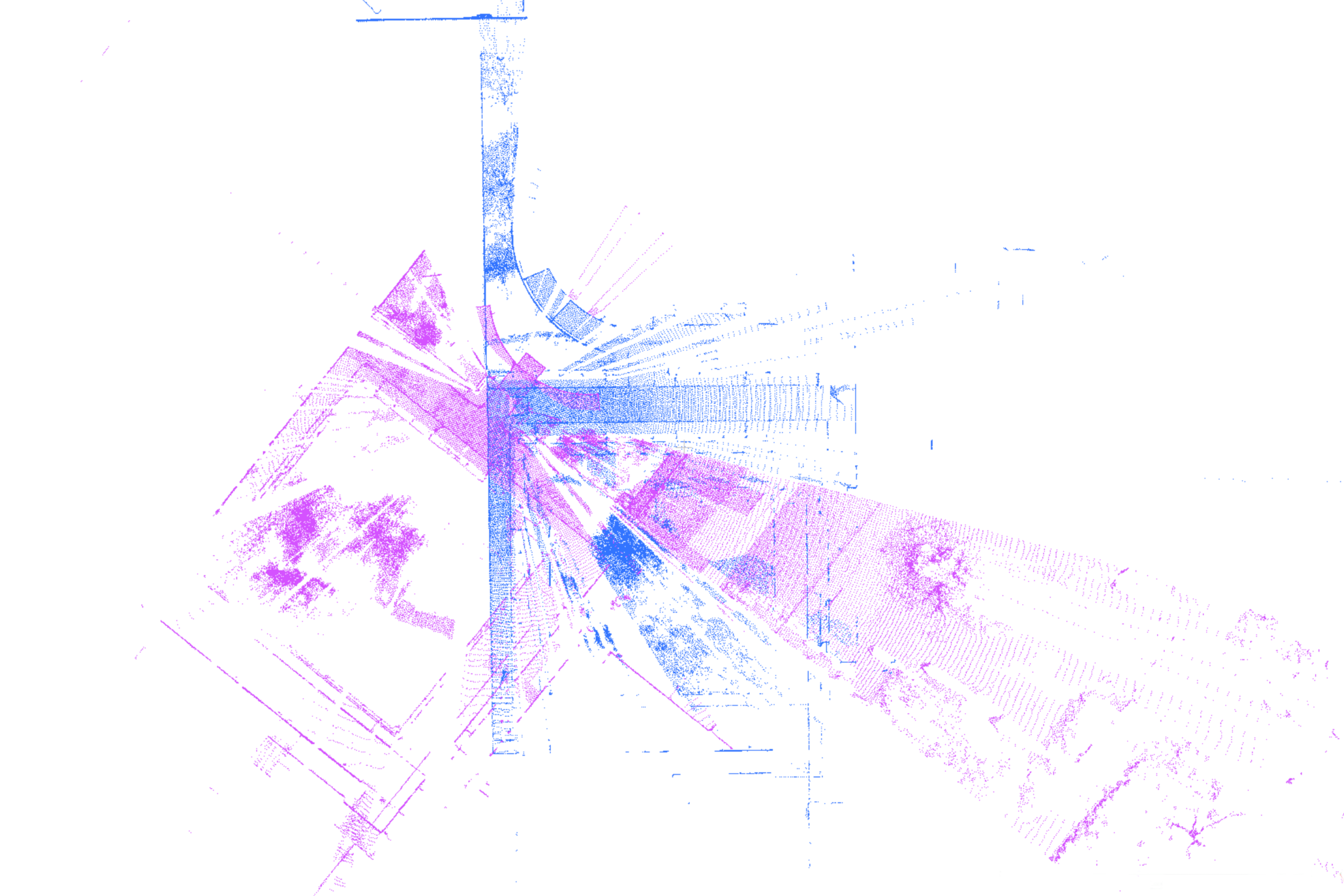
This data set was recorded in the University Clermont Auvergne (France) with the intention to test registration algorithm robustness in a large structured environment with complex objects such as trees and multiple obstructions in each scan.
| Sensor | Localisation | Number of scans | Avg. points/scan | Max. size* (m) | Resolution** (cm) | Motions between scans |
|---|---|---|---|---|---|---|
| Leica P20 | Clermont-Ferrand (France) | 6 | 9e6 | 70 | 0.35 | large |
Download : UCA (zip: 718.1 MB, file: 2.8 GB)
Note : Data is expressed in the following format: X(meters) Y(meters) Z(meters) Intensity R G B
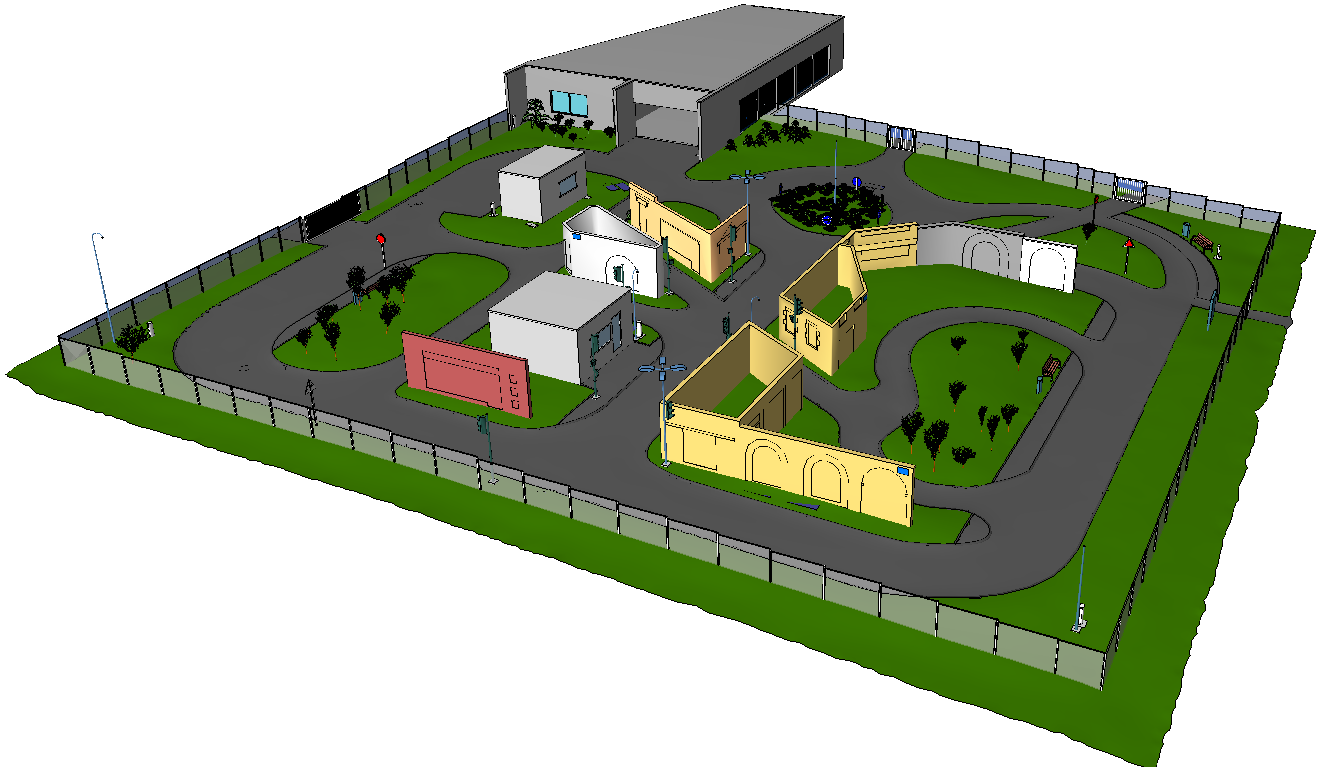
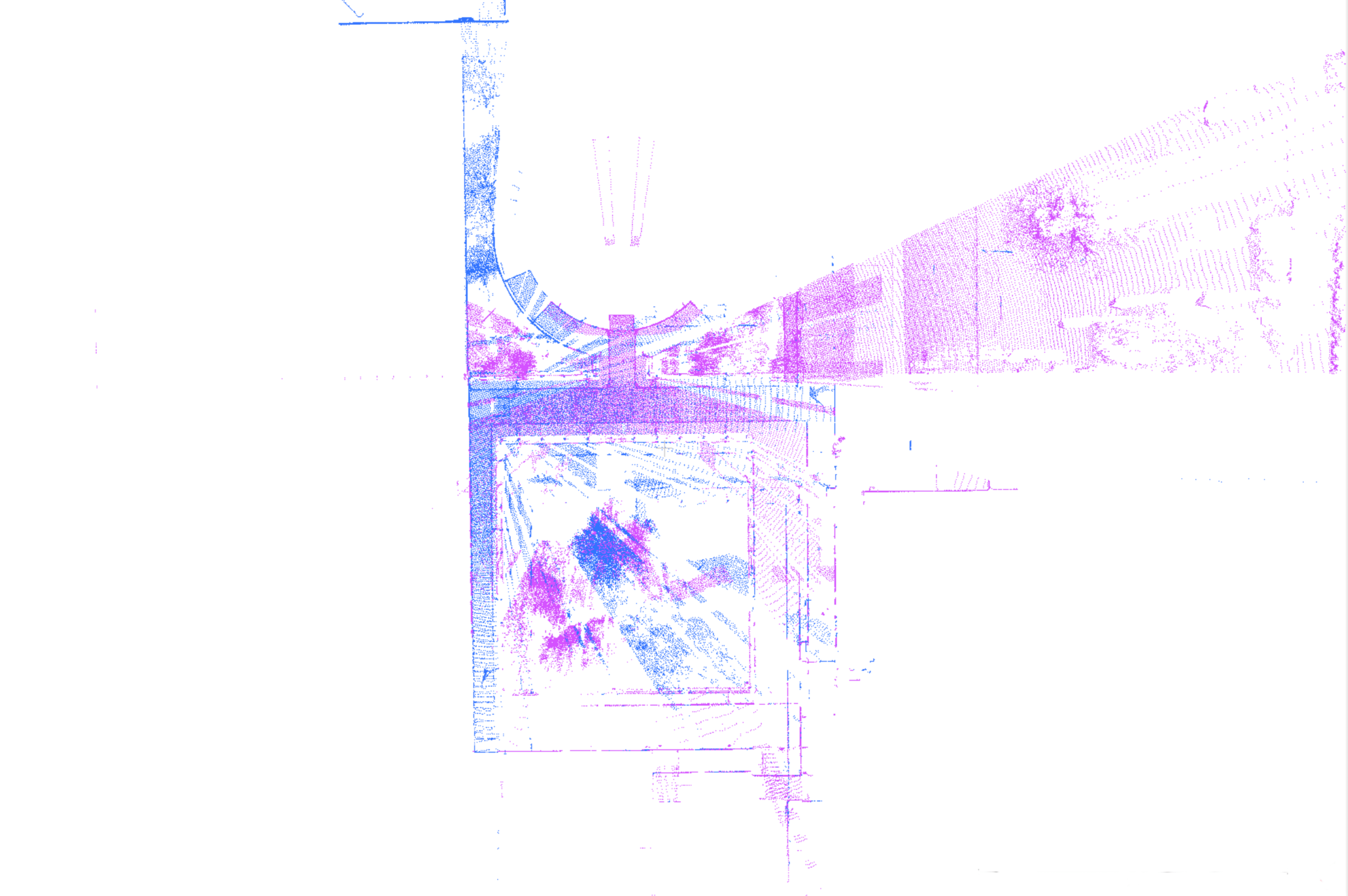
This data set was recorded in the Institut Pascal (UMR 6602, Université Clermont Auvergne, France) with the intention to test registration algorithm robustness in the context of navigation with low accuracy of the sensor and motion during acquisition.
| Sensor | Localisation | Number of scans | Avg. points/scan | Max. size* (m) | Resolution** (cm) | Motions between scans |
|---|---|---|---|---|---|---|
| Velodyne HDL-32E | Clermont-Ferrand (France) | 40 | 56000 | 120 | 7.7 | small |
Download : PAVIN (zip: 24,3 MB, file: 61,1 MB)
Note : Data is expressed in the following format: X(meters) Y(meters) Z(meters)
* max size corresponds to the maximum length between boundary points of the clouds.
** resolution corresponds to the average distance between each point and its closest neighbor.
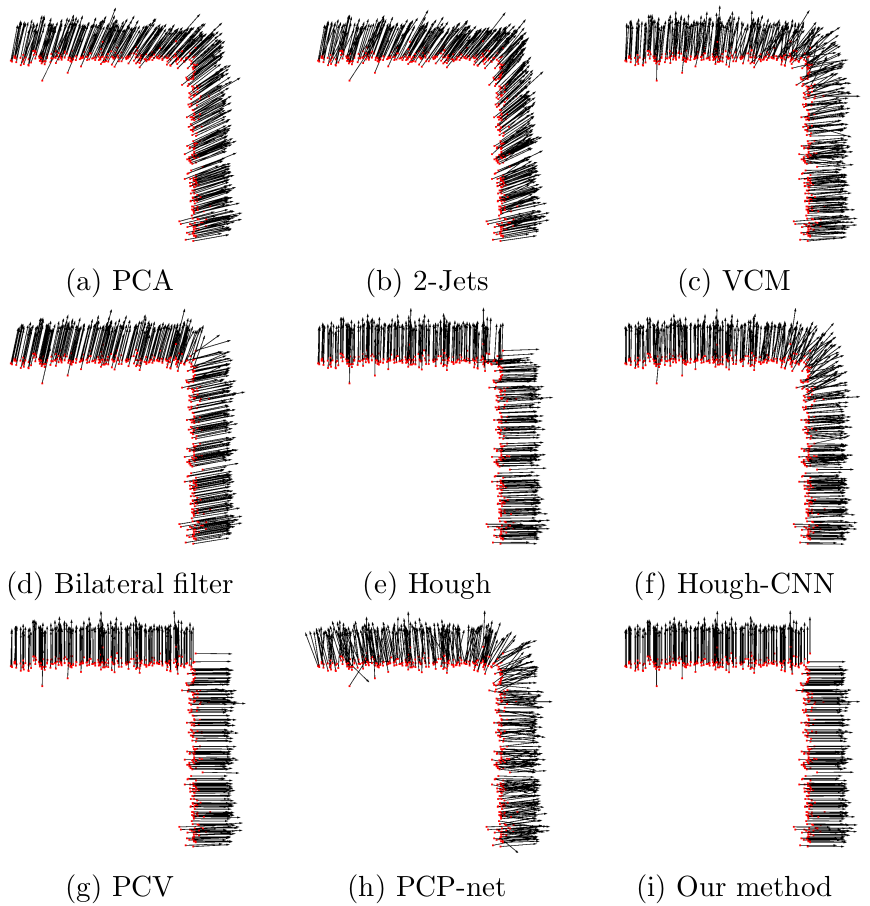
The work proposed here introduces a robust normal vector estimator for point cloud data. It can handle sharp features as well as smooth areas. Our method is based on the inclusion of a robust estimator into a Principal Component Analysis in the neighborhood of the studied point, so that it can detect and reject outliers automatically during the estimation. A projection process ensures robustness against noise. Two automatic initializations are computed, leading to independent optimizations making the algorithm robust to neighborhood anisotropy around sharp features. An evaluation has been carried out in which the algorithm is compared to state-of-the-art methods. The results show that it is more robust against low and/or non-uniform samplings, high noise levels and outliers. Moreover, our algorithm is fast relative to existing methods handling sharp features. The published paper relative to this algorithm will be available as soon as possible.
The provided code does not have any library dependance and is self-contained. A readme file is associated for further installation help. Please contact us for any question you may have.
Download : Normal estimation code (zip: 1,2 MB, file: 5,5 MB)
J. Sanchez, F. Denis, P. Checchin, F. Dupont, L. Trassoudaine, "Global registration of 3D LiDAR point clouds based on scene features: Application to structured environments.", MDPI Remote Sensing 9.10 (2017): p.1014
Julia Sanchez held a doctoral fellowship from la Région Rhône-Alpes. The authors would like to thank Laurent Malaterre for the acquisitions.
julia.sanchez@univ-lyon1.fr